Construcción de robots para dummies
Si usted está construyendo un robot, que está haciendo un montón de conexiones eléctricas, por lo que usted está tratando con un montón de alfileres. La siguiente tabla muestra la señal de los conectores de expansión y números de pin. Puede ayudar a prevenir conexiones cruzadas no deseadas.
| Conector de Expansión | Numero PIN | Señal | Conector de Expansión | Numero PIN | Señal |
|---|
| 1,2 | | Suelo | 16 | P11 | LED verde |
| 3,4 | | +5 voltios | 17 | P12 | Puente J7 |
| 5 | P0 | Bigote izquierdo | 18 | P13 | Puente J6 |
| 6 | P1 | Bigote derecho | 19 | P14 | Interruptor 1 |
| 7 | P2 | Bigote trasero | 20 | P15 | Interruptor 2 |
| 8 | P3 | Sensor de temperatura | 21 | | RB7 del coprocesador |
| 9 | P4 | Sensor de luz | 22 | | Pulso Encoder |
| 10 | P5 | Sensor PIR | 23 | | Servo motor # 1 |
| 11 | P6 | RC de entrada del motor de accionamiento | 24 | | Servo motor # 2 |
| 12 | P7 | Salida de voz | 25 | | Servo motor # 3 |
| 13 | P8 | Red de coprocesadores | 26 | | Servo motor # 4 |
| 14 | P9 | Altavoz | 27-40 | Sin usar | |
| 15 | P10 | LED rojo | | | |
Tamaños de taladro tornillo comunes utilizados en la construcción de robots
La siguiente tabla muestra los tamaños de broca de perforación y de remoción del grifo para utilizar con diversos tamaños de tornillos que se utilizan comúnmente en la construcción de robots. Mantener esta información a mano se puede ahorrar algo de tiempo a construir.
| Tornillo | Toque Taladro | Taladro Liquidación |
|---|
| 2-256 | .070 (# 50) | .089 (# 43) |
| 4-40 | .089 (# 43) | .116 (# 32) |
| 6-32 | .106 (# 36) | .144 (# 27) |
| 8-32 | .136 (# 29) | .170 (# 18) |
| 10-32 | .159 (# 21) | .196 (# 9) |
PBASIC Programación Referencias para la construcción de robots
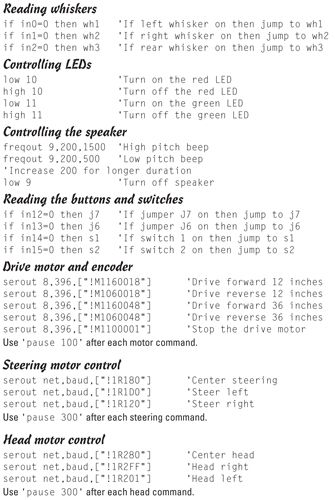
Si usted está interesado en la construcción de robots, usted va a estar trabajando con PBasic, el lenguaje utilizado para escribir código para microprocesadores. Las siguientes listas le indican cómo utilizar PBasic para ayudar programa diversas funciones:
Sobre el autor
 Proyectos electrónicos: cómo construir un controlador de motor
Proyectos electrónicos: cómo construir un controlador de motor Este proyecto presenta un circuito de tablero que impulsa un pequeño motor de corriente continua 3 V desde un puerto paralelo. Debido a que este motor utiliza mucho más corriente que un puerto paralelo puede manejar, una matriz de ULN2003…
 Proyectos de Electrónica: Cómo crear constantes en código PBASIC
Proyectos de Electrónica: Cómo crear constantes en código PBASIC Si usted comienza a utilizar circuitos programables en sus proyectos de electrónica, que va a terminar de escribir algo de código. Si el circuito programable es un BASIC Stamp, que voy a escribir ese código en PBASIC.En PBASIC, puede crear sus…
Proyectos de Electrónica: Cómo crear nombres en código PBASIC Cuando los proyectos de electrónica que tienen en el ámbito de los circuitos programables, es posible que se encuentre escribiendo algo de código PBASIC. En PBASIC, puede crear nombres para utilizar como etiquetas del programa. También puede…
Proyectos electrónicos: cómo hacer matemáticas en código PBASIC Un poco de programación es para que su proyecto de electrónica cuando utiliza microprocesadores programables como el BASIC Stamp. El BASIC Stamp usa Parallax BASIC (PBASIC). PBASIC le permite realizar sumas, restas, multiplicaciones y divisiones…
 Proyectos electrónicos: cómo programar un servo en PBASIC
Proyectos electrónicos: cómo programar un servo en PBASIC Para crear el movimiento en su proyecto de electrónica, se puede añadir un dispositivo muy útil, llamaste servo, que le permite controlar el movimiento mecánico con un programa BASIC Stamp. LA servo es un tipo especial de motor que está…
Proyectos electrónicos: cómo utilizar endif y más en código PBASIC La programación en PBASIC es un mal necesario cuando se utiliza microprocesadores programables como el BASIC Stamp en sus proyectos de electrónica. PBASIC le permite realizar la lógica en su programa a través de la utilización de SI…
Proyectos electrónicos: cómo utilizar si las declaraciones en código PBASIC Cuando se utiliza microprocesadores programables como el BASIC Stamp en su proyecto de electrónica, un poco de programación está en orden. El BASIC Stamp usa Parallax BASIC (PBASIC), un primo cercano al lenguaje de programación BASIC y muy…
Proyectos de Electrónica: Cómo utilizar los comentarios en código PBASIC Si usted está usando un BASIC Stamp para controlar las funciones de un proyecto de electrónica, estará escribiendo código en Parallax BASIC (PBASIC). El uso de comentarios en el código le ayudará a recordar lo que cada pequeño trozo de…
Tamaños de brocas comúnmente utilizados en la electrónica Circuitos de construcción y otros aparatos electrónicos requiere un pequeño taladro eléctrico, inalámbrico o no. Invierta en un pequeño banco de montaje en la prensa de taladro si está instalando circuitos en cajas y armarios de proyectos por…
 Selección de un kit robot no programable
Selección de un kit robot no programable ¿Por qué no construir su propio compañero robot de piezas de chatarra por ahí el garaje? La construcción de un robot desde cero no es el mejor lugar para empezar. Para transformar los elementos comunes de la casa en componentes útiles que…
 Proyectos de Electrónica: Cómo usar un servo en un circuito
Proyectos de Electrónica: Cómo usar un servo en un circuito LA servo es un tipo especial de motor para uso en electrónica que está diseñado para girar a una posición particular, y mantenga esa posición hasta que se le gire a una posición diferente. Servos Hobby se utilizan con frecuencia en los…
 Proyectos electrónicos: cómo escribir un programa PBASIC
Proyectos electrónicos: cómo escribir un programa PBASIC Puede utilizar un microcontrolador BASIC Stamp para crear algunos efectos especiales en sus proyectos de electrónica digital. Pero primero tienes que aprender a escribir programas para controlar el controlador. Si usted nunca ha hecho ningún tipo…

