Cómo detectar movimiento con el arduino
Un infrarrojo pasivo (PIR) sensor es un sensor común en algunas casas y la mayoría de los edificios comerciales y le permite detectar movimiento con el Arduino. Es posible que haya visto este sensor en la esquina de una habitación, parpadeando roja de vez en cuando. Registra calor desprendido por las personas, animales u otras fuentes de calor como la radiación infrarroja.
La radiación infrarroja es invisible para el ojo humano pero es fácil para el sensor de distinguir. El sensor en sí es similar al sensor que se encuentra en una cámara digital, pero sin las lentes complejas para capturar una imagen detallada.
Por lo general, este tipo de sensor se utiliza para la detección de movimiento en las alarmas antirrobo. En lugar de detectar el movimiento, lo que realmente detecta cambios en la temperatura.
Tienes dos maneras de obtener un sensor PIR. La primera consiste en desarmar una alarma antirrobo PIR, que probablemente pre-empaquetado con un lente y un sensor. El segundo método consiste en comprar uno destinado específicamente a proyectos de microcontrolador. Este más a menudo viene con una lente básica, mesa de ping-pong-ball-estilo y una placa de circuito desnuda debajo. Este último es más fácil trabajar con porque todos los detalles se conocen.
Considere lo siguiente durante la planificación:
Complejidad: Puede ser difícil de hackear un sensor existente PIR hecho para un sistema específico. Debido a que tiene que comunicarse con ese sistema, sin embargo, el sensor lo general ha marcado claramente las conexiones en la parte posterior.
Una de las ventajas de usar un sensor existente es que es envasados, lo que reduce la cantidad de tiempo que tiene que pasar componentes poniendo juntos. Sistemas Preenvasados están diseñados para ser fáciles de instalar, por lo que también pueden ser capaces de utilizar la calibración manual.
Si está utilizando un sensor PIR que no es preenvasados, debe ser mucho más sencilla en la parte de hardware y software, pero requiere un poco de pensamiento cuidadoso en relación con la vivienda. Algunos sensores PIR tienen su propia lógica de a bordo y funcionan como un interruptor, pasando ALTO cuando el movimiento se produce por encima del umbral. Este tipo de sensor necesita calibración para identificar el cambio de la norma.
Costo: Un hogar PIR sensor costos entre $ 15 y $ 45 (# 163-10 y # 163-30). El gasto principal es la vivienda, por lo general diseñado para ser discreto o buscar adecuadamente alta tecnología. Sensores PIR Bare cuestan una fracción del precio en alrededor de 10 $ (# 163 a 6,50), pero necesitan una vivienda adecuada para ser de alguna utilidad real.
Dónde: Muchas carcasas le permiten encajar perfectamente el sensor contra una pared, o puede ser que considere el uso de mini trípodes para la dirección. Algunos de los soportes del trípode también vienen con una ventosa de montaje, lo que es perfecto para la fijación de su sensor para superficies brillantes como el cristal.
La mayoría de los sensores PIR vienen listos para la acción, necesitando solamente el poder. Se calibran a sí mismos sobre la base de lo que pueden ver a continuación, enviar un ALTO o BAJO valor cuando detectan el cambio. Esto hace que sean fáciles de programar, ya que se trata de las mismas señales como con un pulsador.
En este ejemplo, se aprende cómo utilizar la SE-10, un sensor PIR disponible en todos los principales minoristas de Arduino. Este sensor PIR particular tiene tres cables: rojo, marrón y negro. El cable rojo es la fuente de energía y debe ser conectado a 5V. Curiosamente, el cable negro es el cable de señal y no el suelo. Brown debería ser conectado a tierra y negro al pin 2.
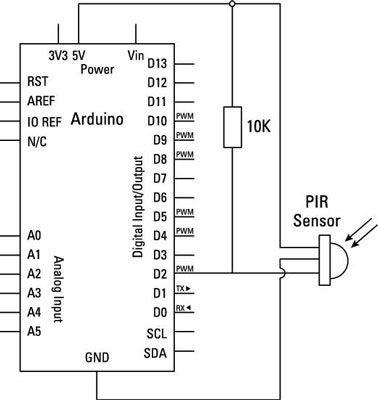
El pasador de señal se conoce como un colector abierto y necesita ser retirado ALTO para empezar. Para ello, se utiliza una resistencia de 10k para conectarlo a 5V también. El pasador, por lo tanto, lee ALTO cuando se produce ningún movimiento y se tira a BAJO cuando hay movimiento.
Necesitas:
Un Arduino Uno
Un tablero
La SE-10 PIR sensor de movimiento
Una resistencia de 10k ohmios
Cables Jump
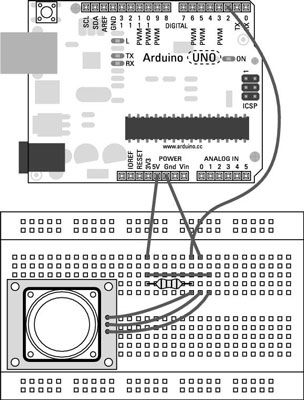
Diseñe el circuito como en los planos de disposición y de circuito.
Completa el circuito y elegir File-ejemplos-01.Basics-DigitalReadSerial en el menú Arduino para cargar el boceto.
Este bosquejo está destinado a un pulsador, pero sigue los mismos principios. Si usted desea hacer el boceto más específicos, se puede guardar con un nombre más apropiado y nombres de variables.
/ * DigitalReadSerialReads una entrada digital en el pin 2, imprime el resultado al código MonitorThis ejemplo de serie se encuentra en el dominio público. * /// Pin digital 2 tiene un pulsador que se le atribuye. Dale un nombre:int pulsador = 2 - // la instalación se ejecuta de rutina una vez cuando se presiona RESET: void setup () {// inicializar la comunicación serial a 9600 bits por segundo: Serial.begin (9600) - // hacer contactos del pulsador de una entrada:pinMode(presionar el botón, ENTRADA) -} // La rutina bucle se ejecuta una y otra vez para siempre: void loop () {// leer el pin de entrada:int ButtonState = digitalRead(pulsador) - // imprimir el estado del botón:Serial.println(ButtonState) -retraso(1) - // retraso en entre lee para la estabilidad}Pulse el botón Compile para comprobar su código. Si lo hace, pone de relieve los errores gramaticales y los convierte en rojo cuando son descubiertos. Si el boceto compila correctamente, haga clic en Cargar para enviar el boceto para su tablero. Cuando se hace la posibilidad de subir, colocar el sensor PIR a una superficie que esté libre de movimiento y abrir el monitor de serie.
Abrir el monitor serie restablece el boceto y el sensor se calibra en los primeros 1 a 2 segundos. Cuando se detecta movimiento, debería ver el ButtonState valor de cambio de 1 (sin movimiento) a 0 (el movimiento).
Si no ocurre nada, compruebe el cableado:
Asegúrese de que está utilizando el número de PIN correcto.
Compruebe las conexiones de la placa. Si los cables de salto o componentes no están conectados mediante las filas correctas en el tablero, no van a trabajar.
Intente reiniciar el sensor PIR desconectando y volviendo a conectar el cable GND, y asegúrese de que no se mueva durante o después de la calibración.






El boceto previo que mostró cómo utilizar una digitalRead para leer, ya sea dentro o fuera, pero lo que si desea manejar un valor analógico, como un interruptor o control de volumen mando regulador?Para este proyecto, es necesarioUn Arduino UnoUn…
Este es el primero y quizás el más básico de los insumos que se puede y debe aprender para sus proyectos de Arduino: el pulsador modesto. Para este proyecto Arduino, se necesita:Un Arduino UnoUn tableroUna resistencia de 10k ohmiosUn pulsadorUn…
De todas las puertas lógicas básicas de la electrónica, la puerta O es el más probable para producir una salida ALTA. Un Puerta OR produce una salida ALTA si cualquiera de las entradas es alta. La salida de una puerta O es BAJO sólo si todas…
Una de las funciones más populares del sistema domótico SmartThings es seguridad para el hogar. Tanto es así, de hecho, que la compañía ha desarrollado un kit que atiende específicamente a la seguridad en el hogar. De hecho, cuenta con tres…
Tenga cuidado de su cámara digital SLR (single lens reflex) de la cámara, y se verá como nuevo incluso después de años de uso. Limpie el cuerpo de la cámara con un paño suave. Si la cámara está siempre expuesto a la niebla salina, humedezca…
No se puede evitar que el polvo en el sensor de réflex digital, pero usted puede tomar medidas para mantenerlo limpio. Reducir al mínimo el número de veces que tiene que limpiar su sensor de réflex digital siguiendo algunas prácticas de…
Tener la lente adecuada para el trabajo proporciona la imagen que está buscando, pero lo que capturar esa imagen con otra historia. La calidad de la cámara trabaja en conjunto con la calidad de su lente para determinar la calidad general de sus…
Averigüe qué tan cerca una lente específica le permite llegar a un sujeto mientras sigue representando en un enfoque nítido, y echa un vistazo a lo que la imagen resultante muestra en el ordenador. Analice sus fotos para determinar qué tan…
Fotografía macro significa crear una imagen en la que el sujeto se representa en el sensor digital (o plano de la película) en su tamaño real. Eso significa que tiene una relación de ampliación de 1: 1, y si usted imprimió una imagen del mismo…
Sensores de imágenes de todas las cámaras digitales "se componen de los mismos componentes. Estos componentes ayudan a determinar cómo se encienden los registros del sensor de la cámara y por lo tanto cómo aparece la imagen. Cada sensor incluye…
Dos tipos principales de sensores se utilizan en las cámaras digitales de hoy: CCD (dispositivo de carga acoplada) y CMOS (semiconductor complementario de óxido metálico) de imágenes. Aunque cada tipo de sensor utiliza una tecnología diferente…
Hay una cosa importante para recordar acerca de las distancias focales: No actuar de la misma como lo hicieron en cámaras de 35 mm de la película si tiene un sensor que es más pequeño que un marco de 35 mm de la película. Si usted tiene una…