¿Cómo medir la distancia con el arduino
Dos sensores para medir la distancia con el Arduino son muy populares: el sensor de proximidad de infrarrojos y el telémetro ultrasónico. Funcionan de manera similar y lograr más o menos lo mismo, pero es importante escoger el sensor adecuado para el medio ambiente que se encuentre.
Un sensor de proximidad de infrarrojos tiene una fuente de luz y un sensor. La fuente de luz rebota la luz infrarroja de los objetos y de vuelta al sensor, y el tiempo que tarda la luz para volver se mide para indicar qué tan lejos está un objeto.
Un telémetro ultrasónico dispara ondas sonoras de alta frecuencia y se detecta un eco cuando llegan a una superficie sólida. Al medir el tiempo que tarda una señal de recuperarse, el telémetro ultrasónico puede determinar la distancia recorrida.
Sensores de proximidad de infrarrojos no son tan precisos y tienen un rango mucho más corto que telémetros ultrasónicos.
Considere lo siguiente durante la planificación:
Complejidad: Ambos sensores están diseñados para ser muy fácil de integrar con los proyectos de Arduino. En el mundo real, se usan para aplicaciones de electrónica similares, tales como metros de proximidad en la parte posterior de los coches que suenen al acercarse a la acera. Una vez más, la complejidad principal es la vivienda de manera efectiva.
Sensores de proximidad de infrarrojos, tales como los realizados por la forma tienen orificios de los tornillos útiles en el exterior del cuerpo del sensor. Maxbotix hace telémetros ultrasónicos que no tienen estos montajes, pero su forma cilíndrica hace que sean fáciles de montar en una superficie mediante la perforación de un agujero a través.
Costo: Sensores de proximidad de infrarrojos costará alrededor de $ 15 (# 163-10) y tienen un rango de hasta aproximadamente 59 pulgadas o menos. Telémetros ultrasónicos tienen una mayor variedad posible y precisión, pero una igualmente gran precio, con un costo entre $ 27 (# 163-18) para un sensor que puede leer hasta 254 pulgadas (645 cm) y $ 100 (# 163-65) para una modelo más resistente a la intemperie que se puede leer hasta 301 pulgadas (765 cm).
Dónde: Una aplicación común para estos sensores está monitoreando la presencia de una persona o un objeto en un espacio particular, especialmente cuando una almohadilla de presión sería demasiado obvio o fácil de evitar, o cuando un sensor PIR mediría demasiado ampliamente. El uso de un sensor de proximidad le permite saber cuando alguien está en una línea recta desde ese sensor, por lo que es una herramienta muy útil.
Sensores de proximidad IR están bien en entornos oscuros, pero realizan terriblemente bajo la luz solar directa. El telémetro ultrasónico MaxBotix es uno de los sensores más fiables. Al usar telémetros ultrasónicos, también puede elegir la forma amplia o estrechar una viga que desea. Un sensor grande, en forma de lágrima es perfecto para detectar grandes objetos que se mueven en una dirección general, mientras haces estrechos son grandes para la medición de precisión.
En este ejemplo, se aprende cómo medir distancias precisas utilizando un MaxBotix LV-EZ0. El EZ0, EZ1, EZ2, EZ3 y EZ4 todos funcionan de la misma manera, pero cada uno tiene una viga ligeramente más estrecho, por lo que elegir el más adecuado para su proyecto.
El telémetro necesita un poco de montaje de menor importancia. Para utilizar el telémetro en su circuito, que sea necesario soldar en los pines de cabecera para utilizarlo en un circuito, o soldadura en longitudes de cable.
Usted tiene tres formas de conectar el telémetro: utilizando analógico, ancho de pulso, o la comunicación serie. En este ejemplo, se aprende la forma de medir el ancho de pulso y convertir que a la distancia. La salida analógica se puede leer directamente en sus pines de entrada analógica, pero proporciona resultados menos precisos que ancho de pulso. Este ejemplo no cubre la comunicación serie.
Necesitas:
Un Arduino Uno
Un Buscador LV-EZ0 rango ultrasónico
Cables Jump
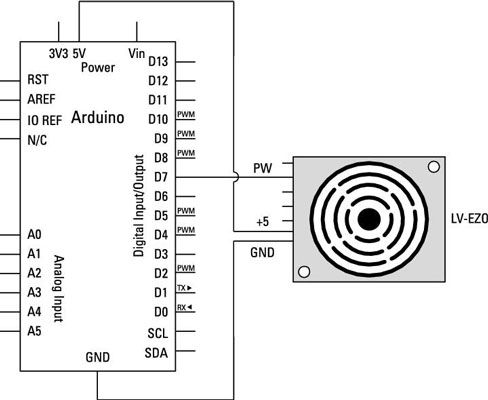
Completa el circuito desde los planos de disposición y de circuito. Las conexiones para el telémetro están claramente marcadas en la parte inferior de la PCB. Las conexiones de 5V y GND proporcionan energía para el sensor y deben ser conectados a los suministros de 5V y GND en el Arduino.
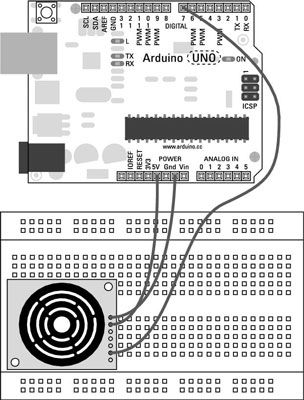
La conexión PW es la señal de ancho de pulso que será leído por el pin 7 en el Arduino. Asegúrese de que el sensor de distancia se fija a una especie de base de apuntando en la dirección que se desea medir.
Usted puede encontrar el código MaxSonar por Bruce Allen, en el patio de recreo de Arduino, junto con algunas notas y funciones adicionales. Crear un nuevo boceto, copie o escriba el código en él, y guardarlo con un nombre fácil de recordar, como myMaxSonar.
. // Siéntase libre de utilizar este código # 8232 - // Por favor, sea respetuoso, reconociendo el autor en el código si utiliza o modificarlo # 8232 - // Autor:. Bruce Allen # 8232 - // Fecha: 23/07 / 09 # 8232- # 8232 - // Digital pin 7 para la lectura en el ancho de pulso del dispositivo MaxSonar # 8232 -. // Esta variable es una constante debido a que el pasador no cambiará durante la ejecución de este código.const int pwPin = 7- # 8232 - // variables necesarias para almacenar valoreslargo pulso, pulgadas, instalación cm void () {// Esto abre una conexión en serie para disparar a los resultados al consoleSerial.begin PC (9600) -} void loop () {pinMode (pwPin, INPUT) - // Usado para leer en el pulso que se está enviando por el dispositivo MaxSonar .// pulso representación Ancho con un factor de escala de 147 dólares por Inch.pulse = pulseIn(pwPin, ALTO) - // 147uS por inchinches = pulso / 147 - // cambio pulgadas a centimetrescm = pulgadas * 2.54-Serial.print (pulgadas) -Serial.print ("en") -Serial.print (cm) -Serial.print ("cm") - Serial.println () -retraso(500) -}Pulse el botón Compile para comprobar su código. El compilador destaca los errores gramaticales, convirtiéndolos en rojo cuando son descubiertos. Si el boceto compila correctamente, haga clic en Cargar para enviar el boceto para su tablero. Cuando se hace la posibilidad de subir, abra el monitor de serie y deberá ver la distancia se mide en pulgadas y centímetros. Si el valor es fluctuante, trate de usar un objeto con una superficie más grande.
Este bosquejo le permite medir con precisión la distancia en línea recta. Prueba de esto con una cinta métrica y hacer ajustes al código si encuentra discrepancias.
-
 Como montar los sensores de posición en el bastidor de la impresora RepRap 3d
Como montar los sensores de posición en el bastidor de la impresora RepRap 3d -
 Conexión del pi frambuesa y el arduino
Conexión del pi frambuesa y el arduino -
 Añadir al lector RFID para el sistema de entrada de teclado
Añadir al lector RFID para el sistema de entrada de teclado -
 Cómo calibrar sus entradas con el arduino
Cómo calibrar sus entradas con el arduino - Cómo cambiar la velocidad de un motor de corriente continua con el Arduino
-
 ¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino
¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino
Mediante el uso de un potenciómetro (o cualquier sensor analógico), es posible controlar directamente el servo con el Arduino de la misma manera que te gustaría controlar una garra mecánica en las arcadas.El boceto KnobEste ejemplo muestra cómo…
Puede crear movimientos de barrido en un servomotor con el Arduino. A barridos servo motor desde 0 # 186- a 179 # 186- y luego de vuelta otra vez, de una manera similar al movimiento de un viejo reloj rotatorio.El boceto de barridoNecesitas:Un…
Un infrarrojo pasivo (PIR) sensor es un sensor común en algunas casas y la mayoría de los edificios comerciales y le permite detectar movimiento con el Arduino. Es posible que haya visto este sensor en la esquina de una habitación, parpadeando…
El Arduino le permite ir más allá de la reproducción de un sonido - a crear su propio instrumento, similar al Theremin. los Theremin, lleva el nombre de su inventor L # 233-a Theremin, fue uno de los primeros instrumentos electrónicos,…
Usted aprenderá cómo hacer un botón en pantalla en el procesamiento que afecta a un LED física en tu Arduino. Esto es un gran dibujo para empezar con las interacciones entre los ordenadores y el mundo real, y entre un Arduino y…
La única cosa mejor que el envío de señales a procesamiento está enviando señales múltiples, ¿verdad? Envío de señales múltiples a menudo es un obstáculo, sin embargo, porque a pesar de enviar los valores de múltiples sensores es fácil,…
El motor de corriente continua en su kit Arduino es el más básico de los motores eléctricos y se utiliza en todo tipo de productos electrónicos de hobby. Cuando la corriente pasa a través, que gira continuamente en una dirección hasta los…
Estos proyectos Arduino están diseñados para mostrar el valor de los insumos utilizando el serial monitor. Serial es un método de comunicación entre un periférico y un ordenador. En este caso, es la comunicación en serie en la Universal Serial…
El boceto previo que mostró cómo utilizar una digitalRead para leer, ya sea dentro o fuera, pero lo que si desea manejar un valor analógico, como un interruptor o control de volumen mando regulador?Para este proyecto, es necesarioUn Arduino UnoUn…
Tener la lente adecuada para el trabajo proporciona la imagen que está buscando, pero lo que capturar esa imagen con otra historia. La calidad de la cámara trabaja en conjunto con la calidad de su lente para determinar la calidad general de sus…
Sensores de imágenes de todas las cámaras digitales "se componen de los mismos componentes. Estos componentes ayudan a determinar cómo se encienden los registros del sensor de la cámara y por lo tanto cómo aparece la imagen. Cada sensor incluye…
Dos tipos principales de sensores se utilizan en las cámaras digitales de hoy: CCD (dispositivo de carga acoplada) y CMOS (semiconductor complementario de óxido metálico) de imágenes. Aunque cada tipo de sensor utiliza una tecnología diferente…