Cómo girar un motor de corriente continua con el arduino
El motor de corriente continua en su kit Arduino es el más básico de los motores eléctricos y se utiliza en todo tipo de productos electrónicos de hobby. Cuando la corriente pasa a través, que gira continuamente en una dirección hasta los topes actuales. A menos marcada específicamente con un + o -, motores de corriente continua no tienen polaridad, lo que significa que usted puede cambiar los dos cables más para invertir la dirección del motor.
El boceto del motor
Usted necesitará un circuito de control simple para convertir su motor encendido y apagado.
Necesitas:
Un Arduino Uno
Un tablero
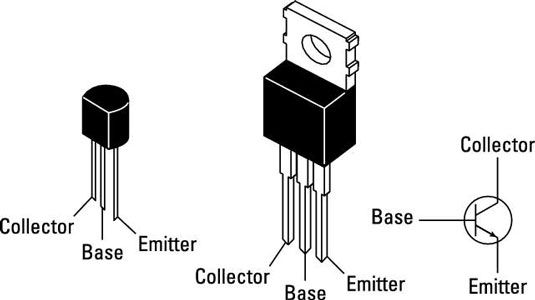
Un transistor
Un motor de corriente continua
Un diodo
Una resistencia de 2.2k ohm
Cables Jump
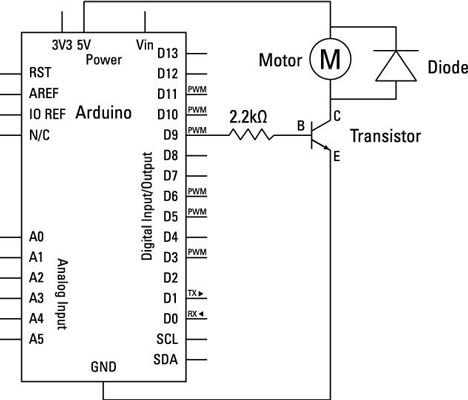
Para alimentar el motor, es necesario enviar 5V a través de él y luego a tierra. Esta tensión hace girar el motor, pero usted tiene el control de la misma. Para darle a su control de Arduino de la potencia del motor, y por lo tanto su rotación, se coloca un transistor justo después de que el motor.
El transistor es un interruptor de accionamiento eléctrico que puede ser activado por medio de pasadores digitales de su Arduino. En este ejemplo, es controlado por el pin 9 en tu Arduino, de la misma manera como un LED, excepto que el transistor permite la gira el circuito del motor encendido y apagado.
Este circuito funciona, pero todavía permite la posibilidad de crear una corriente inversa por el impulso del motor, ya que reduce la velocidad, o porque el motor se podría convertir. Si se genera corriente inversa, que viaja desde el lado negativo del motor y trata de encontrar la ruta más fácil a tierra.
Esta ruta puede ser a través del transistor oa través de la Arduino. No se puede saber a ciencia cierta lo que va a suceder, por lo que necesita para proporcionar una manera de controlar este exceso de corriente.
Para estar seguro, se coloca un diodo a través del motor. El diodo se enfrenta hacia la fuente de la tensión, lo que significa que la tensión es forzado a través del motor, que es lo que quieres. Si la corriente se genera en la dirección opuesta, ahora se puede bloquear fluya dentro de la Arduino.
Si coloca el diodo de la manera equivocada, la corriente no pasa por el motor y se crea un cortocircuito. El cortocircuito intenta fundamentar toda la corriente disponible y podría romper su puerto USB o por lo menos, mostrar un mensaje de advertencia, le informa de que el puerto USB está llegando demasiado poder.
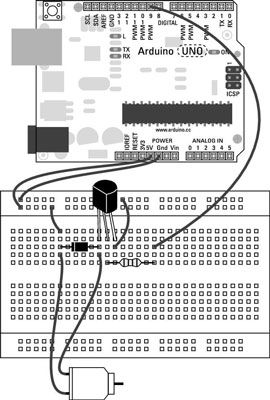
Construya el circuito como se muestra, y abrir un nuevo boceto Arduino. Elija el botón Guardar y guarde el dibujo con un nombre fácil de recordar, como myMotor, a continuación, escriba el siguiente código:
int motorPin = 9-void setup () {pinMode(motorPin, SALIDA) -} void loop () {digitalWrite (motorPin, ALTA) -retraso(1000) -digitalWrite(motorPin, BAJO) -retraso(1000) -}Después de haber escrito el boceto, guardarlo y pulse el botón Compile para comprobar su código. El Arduino Ambiente comprueba el código de los errores de sintaxis (gramática para su código) y los destaca en el área de mensajes. Los errores más comunes son los errores tipográficos, puntos y comas que faltan, y entre mayúsculas y minúsculas.
Si el boceto compila correctamente, haga clic en Cargar para cargar el boceto para su tablero. Usted debe ver a su motor en giro por un segundo y detener durante un segundo en varias ocasiones.
Si eso no es lo que ocurre, debe volver a revisar su cableado:
Asegúrese de que usted está utilizando pin número 9.
Compruebe que el diodo se enfrenta a la forma correcta, con la banda frente a la conexión de 5v.
Compruebe las conexiones de la placa. Si los cables de salto o componentes no están conectados mediante las filas correctas en el tablero, no van a trabajar.
El desglose boceto Motor
Este es un boceto muy básico, y usted puede notar que se trata de una variación en el esquema de parpadeo. En este ejemplo se cambia el hardware, pero utiliza el mismo código para controlar un LED.
En primer lugar, el pasador se declara usando pin digital 9.
int motorPin = 9-
En la configuración, pin 9 se define como una salida.
void setup () {pinMode(motorPin, SALIDA) -}El bucle cuenta la señal de salida para ir a ALTO, esperar a 1000 mS (1 segundo), vaya a BAJO, esperar otros 1000 mS, y se repetirá. Este escenario le da la más básica de control de motores, diciéndole al motor cuando ir encendido y apagado.
void loop () {digitalWrite (motorPin, ALTA) -retraso(1000) -digitalWrite(motorPin, BAJO) -retraso(1000) -}-
 Cómo subir el firmware marlin a la electrónica de rampas en su impresora Prusa i3 3d
Cómo subir el firmware marlin a la electrónica de rampas en su impresora Prusa i3 3d -
 Encendido de la frambuesa pi
Encendido de la frambuesa pi -
 Cómo agregar y probar el relé para la entrada del proyecto Arduino sistema de teclado
Cómo agregar y probar el relé para la entrada del proyecto Arduino sistema de teclado -
 Cómo calibrar sus entradas con el arduino
Cómo calibrar sus entradas con el arduino -
 Cómo cambiar la velocidad de un motor de corriente continua con el Arduino
Cómo cambiar la velocidad de un motor de corriente continua con el Arduino -
 ¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino
¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino
Mediante el uso de un potenciómetro (o cualquier sensor analógico), es posible controlar directamente el servo con el Arduino de la misma manera que te gustaría controlar una garra mecánica en las arcadas.El boceto KnobEste ejemplo muestra cómo…
Puede crear movimientos de barrido en un servomotor con el Arduino. A barridos servo motor desde 0 # 186- a 179 # 186- y luego de vuelta otra vez, de una manera similar al movimiento de un viejo reloj rotatorio.El boceto de barridoNecesitas:Un…
El Arduino le permite ir más allá de la reproducción de un sonido - a crear su propio instrumento, similar al Theremin. los Theremin, lleva el nombre de su inventor L # 233-a Theremin, fue uno de los primeros instrumentos electrónicos,…
Usted aprenderá cómo hacer un botón en pantalla en el procesamiento que afecta a un LED física en tu Arduino. Esto es un gran dibujo para empezar con las interacciones entre los ordenadores y el mundo real, y entre un Arduino y…
El contenido de los circuitos y bocetos Arduino puede variar mucho. Antes de empezar, hay un proceso sencillo para subir un boceto de una placa Arduino que puedes consultar.Siga estos pasos para cargar su dibujo:Conecta tu Arduino con el cable…
Estos proyectos Arduino están diseñados para mostrar el valor de los insumos utilizando el serial monitor. Serial es un método de comunicación entre un periférico y un ordenador. En este caso, es la comunicación en serie en la Universal Serial…
El boceto previo que mostró cómo utilizar una digitalRead para leer, ya sea dentro o fuera, pero lo que si desea manejar un valor analógico, como un interruptor o control de volumen mando regulador?Para este proyecto, es necesarioUn Arduino UnoUn…
Este es el primero y quizás el más básico de los insumos que se puede y debe aprender para sus proyectos de Arduino: el pulsador modesto. Para este proyecto Arduino, se necesita:Un Arduino UnoUn tableroUna resistencia de 10k ohmiosUn pulsadorUn…
Dos transistores electrónicos se pueden conectar para formar una Darlington transistor (a veces llamada Darlington par), que puede cambiar mucho más corriente que el circuito colector-emisor de un transistor de lata estándar. Puede usar…
Este proyecto presenta un circuito de tablero que impulsa un pequeño motor de corriente continua 3 V desde un puerto paralelo. Debido a que este motor utiliza mucho más corriente que un puerto paralelo puede manejar, una matriz de ULN2003…
Este proyecto muestra cómo montar un NO transistor sencilla puerta en una protoboard sin soldadura. Para este proyecto electrónica, un pulsador normalmente abierto se utiliza como la entrada. Cuando no se pulsa el botón, la entrada es baja y la…
Cada uno de los ocho pines de salida de datos en un puerto paralelo proporciona 5 V DC a su circuito electrónico. Esa cantidad de voltaje puede fuente cerca de 10 mA o 12 mA - suficiente para conducir un LED directamente. Alternativamente, puede…