Cómo crear movimientos de barrido con el arduino
Puede crear movimientos de barrido en un servomotor con el Arduino. A barridos servo motor desde 0 # 186- a 179 # 186- y luego de vuelta otra vez, de una manera similar al movimiento de un viejo reloj rotatorio.
El boceto de barrido
Necesitas:
Un Arduino Uno
Un servo
Cables Jump
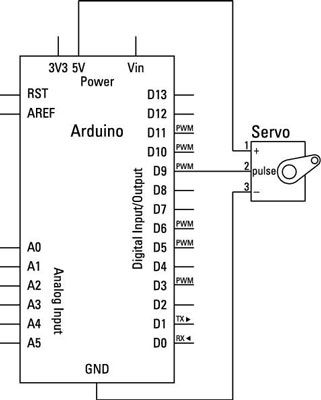
El cableado para un servo es muy sencilla, ya que viene con un aseado, toma de tres clavijas. Para conectarlo a la placa Arduino, sólo tiene que utilizar cables de salto entre los pines de Arduino y los zócalos servo directamente o utilizar un conjunto de pines de cabecera para conectar la toma a su tablero. El servo tiene un conjunto de tres tomas con cables conectados a ellos, por lo general de color rojo, negro y blanco.
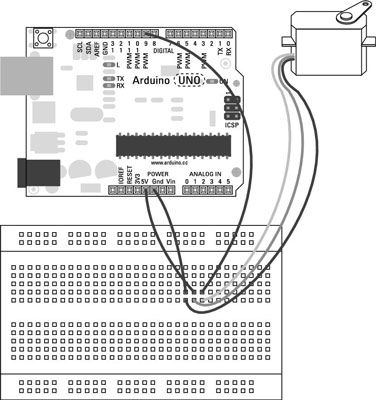
Todos los cálculos y lecturas para mover el motor se realizan en los circuitos dentro del propio servo, así que todo lo que se necesita es poder y una señal del Arduino. Red está conectado a 5V del Arduino para alimentar el motor y el circuito interior negro IT- está conectado a GND a tierra el servo y el blanco está conectado al pin 9 para controlar el movimiento de los servos.
Los colores de estos cables pueden variar, así que compruebe siempre la hoja de datos o cualquier documentación disponible para su motor específico. Otros colores comunes son de color rojo (5V), marrón (GND), y amarillo (señal).
Complete el circuito como se describe y abrir el boceto Sweep eligiendo File-ejemplos-Servo-barrido. El bosquejo de barrido es el siguiente:
// // Barrido por BARRAGAN // Este código de ejemplo se encuentra en el dominio público. # Include lt;Servo.h>Servo myservo- // crear servo objeto de controlar un servo // un máximo de ocho objetos servo se pueden crearint pos = 0- // variable para almacenar la configuración servo positionvoid () {myservo.adjuntar(9) - // concede el servo en el pin 9 al objeto servo} void loop () {para(pos = 0- pos lt; 180- pos + = 1) // va de 0 grados a 180 grados {// en pasos de 1 degreemyservo.escribir(pos) - // decirle servo para ir a la posición en // 'pos' variablesretraso(15) - // espera 15 ms para el servo para llegar a la posición} //para(pos = 180- pos> = 1- posesión 1 =) // pasa de 180 grados a 0 grados {myservo.escribir(pos) - // decirle servo para ir a la posición en // 'pos' variablesretraso(15) - // espera 15 ms para el servo para llegar a la posición //}}Después de haber encontrado el boceto, pulse el botón Compile para comprobar el código. El compilador debe, como siempre, resaltar los errores gramaticales en rojo en el Área de mensajes cuando son descubiertos.
Si el boceto compila correctamente, haga clic en Cargar para cargar el boceto para su tablero. Cuando el boceto ha terminado de cargar, el motor debe comenzar a dar vuelta hacia atrás y hacia adelante a través de 180 Degress, haciendo un baile en la mesa.
Si no ocurre nada, debe volver a revisar su cableado:
Asegúrese de que está usando el pin 9 para los datos (amarillo, blanco /) de la línea.
Compruebe que tiene los otros cables servo conectados a los pines correctos.
El desglose boceto Sweep
Al comienzo de este bosquejo, se incluye una biblioteca. Esta es la biblioteca servo y le ayudará a obtener una gran cantidad de su servo con muy poco código complejo.
#include lt;Servo.h>
La siguiente línea hace que un objeto servo. La biblioteca sabe cómo usar servos pero usted tiene que dar a cada uno un nombre para que pueda hablar con cada servo. En este caso, el nuevo objeto Servo se llama myservo.
El uso de un nombre es similar al nombramiento de su variables-, es decir, que puede ser cualquier nombre, siempre y cuando sean compatibles a través de su código y que no utilizan los nombres que están reservados por el lenguaje Arduino, como int o retraso.
Servo myservo- // crea objeto servo para controlar un servo // un máximo de ocho objetos servo se puede crear
La última línea de las declaraciones es una variable para almacenar la posición del servo.
int pos = 0- // variable para almacenar la posición del servo
En la instalación, el único elemento que desea ajustar es el número de pin del pin de Arduino que se está comunicando con el servo. En este caso, se utiliza el pin 9, pero podría ser cualquier pin PWM.
void setup () {myservo.adjuntar(9) - // concede el servo en el pin 9 al objeto servo}El bucle realiza dos acciones simples, y ambos son para bucles. El primero para bucle aumenta gradualmente la pos variable de 0 a 180. Debido a la biblioteca, se puede escribir valores en grados en lugar de la normal de 0 a 255 utilizado para el control PWM. Con cada bucle, el valor se incrementa en 1 y se envía al servo usando una función específica a la biblioteca servo,
Después de que el bucle actualiza el valor, de un breve retraso de 15 milisegundos se produce mientras que el servo alcanza su nueva ubicación. A diferencia de otros productos, después de que se actualiza un servo que comienza a moverse a su nueva posición en lugar de necesitar que se les diga constantemente.
void loop () {para(pos = 0- pos lt; 180- pos + = 1) // va de 0 grados a 180 grados {// en pasos de 1 degreemyservo.escribir(pos) - // decirle servo para ir a la posición en // 'pos' variablesretraso(15) - // espera 15 ms para el servo para llegar a la posición} //El segundo para bucle hace lo mismo en la dirección opuesta, devolviendo el servo a su posición de inicio.
para(pos = 180- pos> = 1- posesión 1 =) // pasa de 180 grados a 0 grados {myservo.escribir(pos) - // decirle servo para ir a la posición en // 'pos' variablesretraso(15) - // espera 15 ms para el servo para llegar a la posición //}}Este es el más sencillo ejemplo servo, y es una buena idea para comprobar si el servo está funcionando correctamente.
-
 Los componentes esenciales y piezas para sus proyectos BEAGLEBONE
Los componentes esenciales y piezas para sus proyectos BEAGLEBONE -
 Cómo cambiar la velocidad de un motor de corriente continua con el Arduino
Cómo cambiar la velocidad de un motor de corriente continua con el Arduino -
 ¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino
¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino -
 Cómo controlar el servo con el arduino
Cómo controlar el servo con el arduino -
 Cómo girar un motor de corriente continua con el arduino
Cómo girar un motor de corriente continua con el arduino -
 El boceto analoginput para el arduino
El boceto analoginput para el arduino
Circuitos programables en proyectos de electrónica requieren un poco de programación. Si el circuito programable es un BASIC Stamp, que voy a escribir ese código en PBASIC. PBASIC le permite asignar un nombre a un pin de E / S. Esta…
Para crear el movimiento, se puede añadir un dispositivo muy útil, llamaste servo, a su proyecto de electrónica. LA servo es un tipo especial de motor que está diseñado para girar a una posición particular, y mantenga esa posición hasta que…
Para crear el movimiento en su proyecto de electrónica, se puede añadir un dispositivo muy útil, llamaste servo, que le permite controlar el movimiento mecánico con un programa BASIC Stamp. LA servo es un tipo especial de motor que está…
Si usted está construyendo un robot, que está haciendo un montón de conexiones eléctricas, por lo que usted está tratando con un montón de alfileres. La siguiente tabla muestra la señal de los conectores de expansión y números de pin. Puede…
LA servo es un tipo especial de motor para uso en electrónica que está diseñado para girar a una posición particular, y mantenga esa posición hasta que se le gire a una posición diferente. Servos Hobby se utilizan con frecuencia en los…
Una de las cosas más importantes que usted hace cuando usted toma una foto es centrarse en el tema, y su tema es muy probable que un perro de movimiento rápido! A menos que se configura para un tiro de Riley dormir, usar la cámara en el…
La otra opción de enfoque automático en la Canon Rebel 5 / 1200D se puede controlar en el los modos P, Tv, Av, y M es el modo de enfoque automático (AF), que determina si y cuando las cámara bloquea el enfoque. Dispone de las siguientes…
Su Canon EOS 60D ofrece tres esquemas de autoenfoque diferentes, que se seleccionan a través del control del modo AF (que no debe confundirse con Live View Mode AF). Las tres opciones funcionan de este modo:Un disparo: En este modo, el cual está…
Su Canon EOS 6D enfoca automáticamente los objetos que se cruzan puntos de enfoque automático. Dispone de tres modos de enfoque automático de la cámara. Uno es ideal para objetos fijos, y otro es ideal para objetos que se mueven. Usted tiene un…
Aquí están algunas técnicas para fotografiar sujetos que se mueven más lentamente, como caballos, corredores y ciclistas con su EOS 6D. Al congelar el movimiento de los sujetos como estos, el resultado final es un poco aburrido. Cuando se…
Cuanto más se acerque a un sujeto, mayor será el efecto de movimiento en la posición de su centro de coordinación, y la nitidez de las imágenes. El más mínimo movimiento de la cámara o el sujeto a una gama tan cerca puede hacer que el foco…
Las mascotas son una gran macro y sujeto de primer plano fotográfico, pero su nivel de cooperación en posar para las imágenes pueden variar bastante. Si su mascota se sienta en un lugar durante largos períodos de tiempo, o se mueve lentamente,…