¿Cómo controlar la velocidad de un motor de corriente continua con el Arduino
¿Necesita más control de su motor de corriente continua? Usted puede utilizar el boceto MotorControl para el Arduino para poner un poco de entrada en un motor de corriente continua para darle el control total del motor sobre la marcha.
El boceto MotorControl
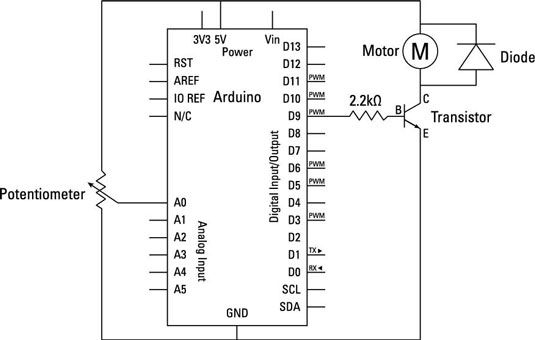
Para obtener el control de la velocidad de su motor siempre que lo necesite, es necesario agregar un potenciómetro para su circuito.
Necesitas:
Un Arduino Uno
Un tablero
Un transistor
Un motor de corriente continua
Un diodo
Un 10k ohm resistencia variable
Una resistencia de 2.2k ohm
Cables Jump
Encontrar un espacio en su tablero para colocar su potenciómetro. El perno central del potenciómetro se conecta de nuevo a pin 9 usando un alambre de salto, y los dos pasadores restantes están conectados a 5V en un lado y GND en el otro.
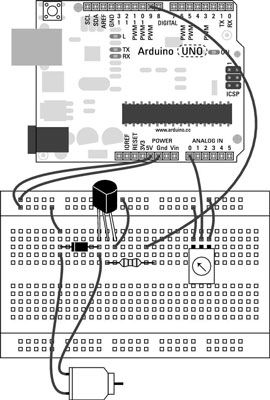
La 5V y GND pueden estar en cualquier lado, pero conmutación ellos invertirán el valor que el potenciómetro envía al Arduino. Aunque el potenciómetro usa la misma corriente y la tierra como el motor, tenga en cuenta que son circuitos separados que ambos se comunican a través de la Arduino.
Después de haber construido el circuito, abra un nuevo boceto Arduino y guardarlo con otro nombre fácil de recordar, como myMotorControl. A continuación, escriba el siguiente código.
int potPin = A0int motorPin = 9-int potValue = 0-int motorValue = 0-void setup () {Serial.begin (9600) -} void loop () {potValue = analogRead(potPin) -motorValue = mapa(potValue, 0, 1,023, 0, 255) -analogWrite(motorPin, motorValue) -Serial.print ("potenciómetro =") -Serial.print(potValue) -Serial.print (" t motor =") -Serial.println(motorValue) -retraso(2) -}Después de haber escrito el boceto, guardarlo y haga clic en el botón Compile para destacar los errores de sintaxis. .
Si el boceto compila correctamente, haga clic en Cargar para cargar el boceto para su tablero. Cuando se hace la posibilidad de subir, usted debería ser capaz de controlar su motor mediante el potenciómetro. Al girar el potenciómetro en una dirección hace que el motor para acelerar arriba girándola hacia otro lado hace que se ralentice.
El desglose MotorControl Sketch
Este bosquejo es una variación sobre el boceto AnalogInOutSerial y funciona exactamente de la misma manera con algunos cambios de nombre para indicar mejor lo que se está controlando y seguimiento en el circuito.
Como siempre, usted declara las diferentes variables utilizadas en el boceto. Se utiliza el potPin asignar el pasador potenciómetro y motorPin para enviar una señal al motor. La variable potValue se utiliza para almacenar el valor bruto del potenciómetro y de los grandes variables motorValue el valor que desea convertir a la salida al transistor para encender el motor.
int potPin = A0int motorPin = 9-int potValue = 0-int motorValue = 0-
Cómo ajustar el boceto MotorControl
Usted puede encontrar que hay una velocidad mínima después de lo cual el motor se acaba de zumbido. Lo hace porque no tiene el poder suficiente para hacer girar. Al monitorear los valores enviados al motor usando el boceto MotorControl, usted puede encontrar valor mínimo del motor para convertir y optimizar el motorValue para encender el motor dentro de su verdadero alcance.
Para encontrar la gama de motorValue, sigue estos pasos:
Con el boceto MotorControl cargado, haga clic en el botón del monitor de serie en la parte superior derecha de la ventana de Arduino.
La ventana del monitor de serie le mostrará el valor del potenciómetro seguido por el valor de salida que se envía al motor, de esta manera:
potenciómetro = 1,023 motor = 255
Estos valores se muestran en una lista larga y actualizar a medida que gira el potenciómetro. Si usted no ve la lista de desplazamiento hacia abajo, asegúrese de que está seleccionada la opción Auto-Desplazamiento.
Comenzando con el potenciómetro de la lectura de un valor de 0, apague el potenciómetro muy despacio hasta que el zumbido se detiene y el motor comienza a girar.
Anote el valor que aparece en este momento.
Utilice un si declaración para decirle al motor para cambiar la velocidad sólo si el valor es mayor que la velocidad mínima necesaria para hacer girar el motor, como sigue:
(la). Encuentra la parte del código que escribe el motorValue al motor:
analogWrite(motorPin, motorValue) -
(b). Sustituirlo por el siguiente fragmento de código:
si(motorValue> yourValue) { analogWrite(motorPin, motorValue) -} otro { digitalWrite(motorPin, LOW) -}Ahora reemplace yourValue con el número que usted ha hecho una nota de.
Si el valor motorValue es mayor que, el motor se acelera. Si es menor que, el pasador está escrito BAJO de manera que es totalmente apagado. También puede escribir analogWrite (motorPin, 0) para llevar a cabo la misma cosa. Optimizaciones Diminuto como éste pueden ayudar a su función de proyecto sin problemas, sin movimiento o valores desperdiciado.
-
 Añadir al lector RFID para el sistema de entrada de teclado
Añadir al lector RFID para el sistema de entrada de teclado -
 Cómo agregar y probar la pantalla LCD para su proyecto reloj arduino
Cómo agregar y probar la pantalla LCD para su proyecto reloj arduino -
 Cómo añadir la entrada de teclado para el ojo que todo lo ve
Cómo añadir la entrada de teclado para el ojo que todo lo ve -
 Cómo calibrar sus entradas con el arduino
Cómo calibrar sus entradas con el arduino - Cómo cambiar la velocidad de un motor de corriente continua con el Arduino
-
 Cómo controlar el servo con el arduino
Cómo controlar el servo con el arduino
Puede crear movimientos de barrido en un servomotor con el Arduino. A barridos servo motor desde 0 # 186- a 179 # 186- y luego de vuelta otra vez, de una manera similar al movimiento de un viejo reloj rotatorio.El boceto de barridoNecesitas:Un…
El Arduino le permite ir más allá de la reproducción de un sonido - a crear su propio instrumento, similar al Theremin. los Theremin, lleva el nombre de su inventor L # 233-a Theremin, fue uno de los primeros instrumentos electrónicos,…
Usted aprenderá cómo hacer un botón en pantalla en el procesamiento que afecta a un LED física en tu Arduino. Esto es un gran dibujo para empezar con las interacciones entre los ordenadores y el mundo real, y entre un Arduino y…
Dos sensores para medir la distancia con el Arduino son muy populares: el sensor de proximidad de infrarrojos y el telémetro ultrasónico. Funcionan de manera similar y lograr más o menos lo mismo, pero es importante escoger el sensor adecuado…
La única cosa mejor que el envío de señales a procesamiento está enviando señales múltiples, ¿verdad? Envío de señales múltiples a menudo es un obstáculo, sin embargo, porque a pesar de enviar los valores de múltiples sensores es fácil,…
El motor de corriente continua en su kit Arduino es el más básico de los motores eléctricos y se utiliza en todo tipo de productos electrónicos de hobby. Cuando la corriente pasa a través, que gira continuamente en una dirección hasta los…
El contenido de los circuitos y bocetos Arduino puede variar mucho. Antes de empezar, hay un proceso sencillo para subir un boceto de una placa Arduino que puedes consultar.Siga estos pasos para cargar su dibujo:Conecta tu Arduino con el cable…
Estos proyectos Arduino están diseñados para mostrar el valor de los insumos utilizando el serial monitor. Serial es un método de comunicación entre un periférico y un ordenador. En este caso, es la comunicación en serie en la Universal Serial…
El boceto previo que mostró cómo utilizar una digitalRead para leer, ya sea dentro o fuera, pero lo que si desea manejar un valor analógico, como un interruptor o control de volumen mando regulador?Para este proyecto, es necesarioUn Arduino UnoUn…
Este es el primero y quizás el más básico de los insumos que se puede y debe aprender para sus proyectos de Arduino: el pulsador modesto. Para este proyecto Arduino, se necesita:Un Arduino UnoUn tableroUna resistencia de 10k ohmiosUn pulsadorUn…
Un transistor dentro de un circuito electrónico funciona como una combinación de un diodo y una resistencia variable, también llamado potenciómetro o maceta. Pero esto no es sólo un pot- ordinaria es una olla mágica cuyo mando está conectado…
Este proyecto presenta un circuito de tablero que impulsa un pequeño motor de corriente continua 3 V desde un puerto paralelo. Debido a que este motor utiliza mucho más corriente que un puerto paralelo puede manejar, una matriz de ULN2003…