Control de estudio de caso del sistema: control de crucero
Después de que el sistema ha sido linealizado, un diagrama de bloques sistema que utiliza la transformada de Laplace (LT) técnicas para el control de realimentación de la velocidad del vehículo puede ser construido. La ecuación diferencial puede ahora ser llevado a la s-Dominio tomando la transformada de Laplace (LT) de ambos lados.
Tomando el LT de todas las cantidades de dominio de tiempo produce correspondiente s-cantidades de dominio. De especial interés la LT del término derivado, bajo condiciones iniciales nulas, se traduce en s veces la cantidad transformada y el LT de una función escalón es 1 /s:
Por último se puede resolver
en cuanto a la entrada del acelerador
y el inicio colina g # 952-:

La reescritura ecuación final a la derecha, identifica lo que se conoce como el planta, en este caso la función del sistema linealizado para la dinámica del vehículo, junto con la perturbación g # 952- plazo debido a la aparición colina en t = 0. Nota la perturbación entra en la planta sin la inclusión del término de ganancia vmax/T.
El diagrama de bloques del sistema, incluyendo una controlador para conducir la posición del acelerador y un sensor a la retroalimentación de la velocidad del vehículo, se muestra en la figura.
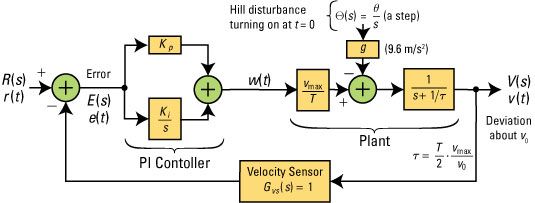
El delta subíndice se ha caído en las señales W(s) Y V(s) Con el entendimiento de que estas cantidades representan desviaciones del acelerador y la velocidad de distancia de los ajustes nominales del acelerador y la velocidad, respectivamente. Para el controlador, se usa un (PI) bloque de construcción proporcional-integral, con constantes de ganancia Kp para la ruta y proporcional Kyo para la ruta integral. Este controlador es bastante común en los sistemas de control.
Nota en un controlador PI las funciones proporcional e integral están en paralelo.
La entrada es diagrama de bloques R(s), Que es el de LT r(t), La entrada de comandos para el control de crucero. La entrada del comando representa la entrada del usuario, que es establecer la velocidad deseada del vehículo a v0 mph.
Lo que queda es encontrar la función del sistema de circuito cerrado H(s) = V(s) / R(s). Se empieza desde la función del sistema en lazo abierto, G0(s), Que es el producto de la s-funciones del sistema de dominio en cascada desde la entrada hasta la salida, con la retroalimentación eliminado y la perturbación se establece en cero:
Con el sensor de velocidad de realimentación conectada, la salida V(s) Solo es [R(s) - V(s)] En la salida de verano (a la izquierda) veces G0(s). Resolviendo para la relación V(s) /R(s) Le da la respuesta a lazo cerrado:
donde a la derecha G0(s) Se insertan y las siguientes sustituciones hechas:
los forma estándar por un denominador de segundo orden es
dónde # 969-n es el frecuencia natural en rad / s y z es el factor de amortiguamiento. Igualando los términos entre los dos resultados denominadores de las ecuaciones de diseño
Para estudiar el impacto de la aparición colina en el control de crucero, lo que necesita la función del sistema que relaciona la señal de error E(s) A la entrada de perturbación # 920- (s) cuando R(s) = 0. Trabajar desde V(s) Inicialmente,
Porque E(s) = -V(s) cuando R(s) = 0 (cero porque la desviación comando es cero por hipótesis), el resultado anterior se cumple para E(s) Con un cambio de signo. La función de Python personalizada cruise_control (wn, zeta, T, vcruise, vmax, tf_mode) calcula la función del sistema B y un coeficiente de matrices para H(s), E(s) / # 920- (s), E(s) / R(s), Y W(s) / R(s). Acceder a la función en el módulo ssd.py.
Control de Estudio de Caso Sistema: Cruise Control

-
 Electrónica componentes: amplificadores de bucle cerrado
Electrónica componentes: amplificadores de bucle cerrado -
 Resolución de ecuaciones diferenciales mediante transformada de Laplace soluciones
Resolución de ecuaciones diferenciales mediante transformada de Laplace soluciones -
 Analizar un circuito de primer orden rl utilizando métodos LaPlace
Analizar un circuito de primer orden rl utilizando métodos LaPlace -
 Determinar dominio y el rango de una función trigonométrica
Determinar dominio y el rango de una función trigonométrica -
 Analizar un circuito de primer orden rc usando métodos LaPlace
Analizar un circuito de primer orden rc usando métodos LaPlace -
 Analizar un circuito RLC utilizando métodos LaPlace
Analizar un circuito RLC utilizando métodos LaPlace
Si usted puede utilizar una ecuación diferencial de segundo orden para describir el circuito que está viendo, entonces usted está tratando con un circuito de segundo orden. Circuitos que incluyen un inductor, condensador y resistencia conectada…
Si usted está interesado en la comprensión de cómo funciona el circuito de realimentación, recuerde esta regla de amplificadores operacionales electrónicos: Si la tensión de entrada es otra cosa que no sea cero, el amplificador operacional se…
Si usted entiende los bloques básicos de circuitos de amplificador operacional de construcción, usted está listo para hacer frente a las acciones de procesamiento complejas con amplificadores operacionales. El uso de circuitos de amplificadores…
El circuito amplificador operacional puede resolver ecuaciones matemáticas rápidas, incluyendo problemas de cálculo, tales como las ecuaciones diferenciales. Para resolver una ecuación diferencial mediante la búsqueda v (t), por ejemplo,…
Transformada de Laplace métodos pueden ser empleados para estudiar circuitos en el s-dominio. Técnicas de Laplace convierten circuitos con señales de tensión y corriente que cambian con el tiempo a la s-dominio para que pueda analizar la acción…
Transformadas de Laplace se pueden utilizar para predecir el comportamiento de un circuito. La transformada de Laplace toma una función de dominio de tiempo f (t), y la transforma en la función F (s) en el s-dominio. Puede ver las transformadas de…
Señales y sistemas en tiempo discreto marchan junto a la garrapata de un reloj. Modelos matemáticos de señales y sistemas en tiempo discreto muestra que la actividad se produce con número entero (número entero) de espacio, pero las señales en…
Herramientas informáticas juegan un papel importante en las señales y los sistemas modernos de análisis y diseño. LCC diferencial y ecuaciones en diferencias son una parte fundamental de los sistemas simples y de alta complejidad.…
He aquí un vistazo a nivel de sistema en la señales y sistemas modelo de una máquina de karaoke - un sistema de reproducción de audio con un potente altavoz que permite a una persona para cantar sobre música grabada. Una interfaz multimedia…
Es probable que tenga algún nivel de familiaridad con la electrónica de consumo, tales como reproductores de MP3, teléfonos inteligentes y dispositivos de tableta, y darse cuenta de que estos productos se basan en señales y sistemas. Pero usted…
El estudio de señales y sistemas establece un formalismo matemático para el análisis, modelado y simulación de sistemas eléctricos en el tiempo, la frecuencia y s- o z-dominios. Existen señales de forma natural y también se crean por la…
Circuitos RLC de segundo orden tienen una resistencia, inductor, y el condensador conectado en serie o en paralelo. Para analizar un circuito paralelo de segundo orden, se sigue el mismo proceso para el análisis de un circuito serie RLC.Aquí hay…