Cómo utilizar pylab diferenciales LCC y ecuaciones en diferencias
Herramientas informáticas juegan un papel importante en las señales y los sistemas modernos de análisis y diseño. LCC diferencial y ecuaciones en diferencias son una parte fundamental de los sistemas simples y de alta complejidad. Afortunadamente, las herramientas de software actuales hacen que sea posible trabajar a través de dominios con estas ecuaciones LCC sin demasiado dolor.
Conteúdo
LCC diferenciales y diferencia ecuaciones están completamente caracterizados por el {lak} Y {bk} Conjuntos de coeficientes. Puede utilizar herramientas como Pylab con el SciPy señal paquete para diseñar filtros de alto rendimiento, en particular en el dominio de tiempo discreto. Las funciones de diseño de filtro de señal le dará la {lak} Y {bk} Coeficientes en respuesta a los requisitos de diseño que de entrada. A continuación, puede utilizar los diseños de filtros en la simulación de sistemas más grandes.
Tiempo continuo
Tres representaciones del sistema de ecuación diferencial LCC son el tiempo, la frecuencia y s-dominios, y los mismos conjuntos de coeficientes, {bk} Y {lak}, Existir en las tres representaciones. Aquí están las relaciones de entrada y salida correspondientes en estos dominios:
Dominio del tiempo (de la ecuación diferencial):
Dominio del tiempo (de respuesta de impulso):
Dominio de la frecuencia:
s-dominio:
En la segunda línea de la ecuación diferencial, la respuesta de impulso, h(t), Junto con la integral de convolución producir la salida, y(t), A partir de la entrada, X(t). En la tercera línea, el teorema de convolución para transformadas de Fourier produce el espectro de salida, Y(F), Como el producto del espectro de entrada, X(F), Y la respuesta de frecuencia, H(F) - Que es la transformada de Fourier de la respuesta al impulso.
En la cuarta línea, el teorema de convolución de transformadas de Laplace produce la s-salida en el dominio, Y(s), Como el producto de la entrada, X(s), Y la función del sistema, H(s) - Que es la transformada de Laplace de la respuesta de impulso.
Los figurehighlights las funciones clave en PyLab y la ssd.py módulo de código que puede utilizar para trabajar a través de los dominios de tiempo continuo. Recuerde, estas funciones están en el nivel superior. Usted puede integrar muchas funciones de nivel inferior (como las matemáticas, la manipulación de matrices y funciones de la biblioteca de trazado) con estas funciones de alto nivel para llevar a cabo tareas de análisis específicos.
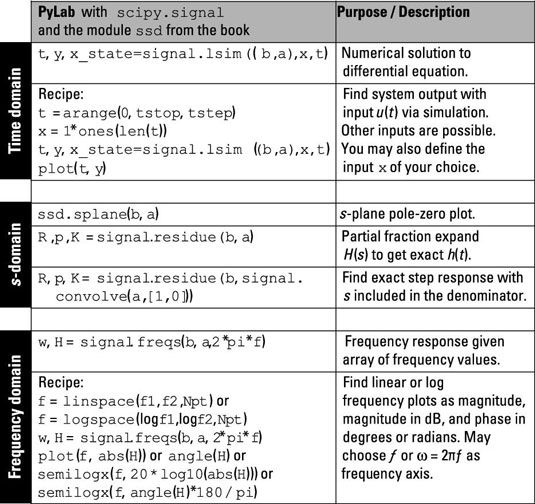
Esto es lo que puede encontrar:
Las filas de dominio de tiempo muestran una receta para resolver numéricamente la ecuación diferencial mediante el uso de signal.lsim ((b, a), x, t) para una entrada función escalón. Los arrays b y la corresponden a los conjuntos de coeficientes {bk} Y {lak}. Son posibles señales de entrada de su propia elección, también. La simulación de dominio de tiempo le permite caracterizar el comportamiento de un sistema en el nivel de forma de onda real.
en el s-filas de dominio, encuentra la parcela polos cero de la función del sistema H(s) mediante el uso ssd.splane (b, a). También encuentre la manera de resolver la expansión en fracciones parciales (PFE) de H(s) Y H(s) /s para obtener una representación matemática de la respuesta de impulso o la respuesta al escalón.
La sección de dominio de la frecuencia ofrece una receta para el trazado de la respuesta de frecuencia del sistema mediante el uso de signal.freqs (b, a, 2 * pi * f). Las opciones incluyen una la respuesta de fase en grados lineal o eje de frecuencia de registro, la magnitud de respuesta de frecuencia, y.
Tiempo discreto
Al igual que para los sistemas de ecuaciones diferenciales que se describen en la sección anterior, el sistema de ecuaciones diferencia LCC tiene tres representaciones: el tiempo, la frecuencia y zdominios, y los mismos conjuntos de coeficientes, {bk} Y {lak}, Existir en las tres representaciones. Aquí están las relaciones de entrada y salida correspondientes en estos dominios:
Dominio del tiempo (de ecuación en diferencias):
Dominio del tiempo (de respuesta de impulso):
Dominio de la frecuencia:
z-dominio:
En la segunda línea de la ecuación de diferencia, la respuesta de impulso, h[n], Junto con la suma de convolución producir la salida, y[n], Forman la entrada, X[n]. En la tercera línea, el teorema de convolución para transformadas de Fourier produce el espectro de salida,
que es el tiempo-discreto transformada de Fourier de la respuesta al impulso.
En la cuarta línea, el teorema de convolución para ztransformadas produce la zsalida en el dominio, Y(z), Como el producto de la entrada, X(z), Y la función del sistema, H(z), Cuál es el ztransformada de la respuesta de impulso.
La cifra pone de relieve las funciones clave en PyLab y la costumbre ssd.py módulo de código que puede utilizar para trabajar a través de los dominios de tiempo discreto.
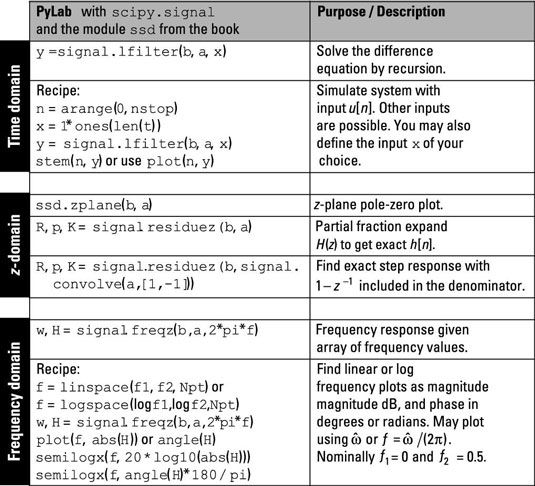
En las filas de dominio de tiempo, a resolver la ecuación diferencia exactamente, utilizando signal.lfilter (b, a, x).
en el zfilas de dominio, usted puede encontrar la trama polos cero de la función del sistema H(z), usando ssd.zplane (b, a), y la expansión en fracciones parciales, usando signal.residuez en lugar de signal.residue.
Las filas de dominio de frecuencia muestran cómo encontrar la respuesta en frecuencia de un sistema de tiempo discreto con signal.freqz (b, a, 2 * pi * f), dónde F es la variable de frecuencia
-
 Ecuaciones diferenciales libro para los maniquíes
Ecuaciones diferenciales libro para los maniquíes -
 Resolución de ecuaciones diferenciales mediante transformada de Laplace soluciones
Resolución de ecuaciones diferenciales mediante transformada de Laplace soluciones -
 Analizar un circuito de primer orden rl utilizando métodos LaPlace
Analizar un circuito de primer orden rl utilizando métodos LaPlace -
 Determinar dominio y el rango de una función trigonométrica
Determinar dominio y el rango de una función trigonométrica -
 Analizar un circuito de primer orden rc usando métodos LaPlace
Analizar un circuito de primer orden rc usando métodos LaPlace -
 Analizar un circuito RLC utilizando métodos LaPlace
Analizar un circuito RLC utilizando métodos LaPlace
Si usted puede utilizar una ecuación diferencial de segundo orden para describir el circuito que está viendo, entonces usted está tratando con un circuito de segundo orden. Circuitos que incluyen un inductor, condensador y resistencia conectada…
Transformada de Laplace métodos pueden ser empleados para estudiar circuitos en el s-dominio. Técnicas de Laplace convierten circuitos con señales de tensión y corriente que cambian con el tiempo a la s-dominio para que pueda analizar la acción…
Un gran mundo de las propiedades se asocia con señales y sistemas - un montón en las matemáticas solo! He aquí diez propiedades inolvidables relacionados con las señales y sistemas de trabajo.La estabilidad del sistema LTITiempo-invariante…
Éstos son los errores más comunes once estudiantes hacen cuando se trata de resolver los problemas y la forma de evitarlos. Reduzca la velocidad suficiente como para pensar en soluciones, y asegúrese de que su comprensión fundamental del…
En el estudio de los sistemas, tanto en tiempo continuo y tiempo discreto, la respuesta de frecuencia y su relación con el polo y cero lugares en el s- y z-aviones, respectivamente, son de importancia fundamental.Este video útiles presenta el…
Después de que el sistema ha sido linealizado, un diagrama de bloques sistema que utiliza la transformada de Laplace (LT) técnicas para el control de realimentación de la velocidad del vehículo puede ser construido. La ecuación diferencial…
Un analizador de espectro digital básico se muestra en la figura. La ventana por defecto, w[n], Es una constante de uno sobre el intervalo de captura de Nr muestras. La FFT trabaja con una señal de tiempo discreto longitud finita. La función de…
Para aplicar con éxito las diversas señales y conceptos de sistemas como parte de escenarios prácticos de ingeniería, lo que necesita saber lo que están disponibles herramientas de análisis. La figura muestra las relaciones matemáticas entre…
Que le den la tarea de diseñar un análogo (en tiempo continuo) filtrar para cumplir con las especificaciones de respuesta de amplitud que se muestran. También es necesario para encontrar la respuesta al escalón del filtro, determinar el valor de…
El orden cero de retención (ZOH), que es inherente a muchas de digital a analógico (DAC convertidores), mantiene la constante salida analógica entre muestras. La acción de los introduce ZOH freQuencaída cy, un rollo fuera de la respuesta de…
Usted no puede apreciar completamente la matemática de señales y sistemas en su primer encuentro. Para mejorar su comprensión, puede utilizar la animación por ordenador para dar vida a algunos de los conceptos más difíciles y espero hacer una…
El estudio de señales y sistemas establece un formalismo matemático para el análisis, modelado y simulación de sistemas eléctricos en el tiempo, la frecuencia y s- o z-dominios. Existen señales de forma natural y también se crean por la…